卧床老人二便能力增强训练机器人的控制系统及其方法
本说明书一个或多个实例涉及康复机器人控制,厂房保洁13825404095更为具体地,涉及到康复机器人硬件系统设计方法和交互行为控制系统设计方法。
背景技术:
1、当前,失能和半失能老人的基本生活需求中,二便能力的康复和清洁护理尤为重要。现阶段主要依赖护工来照料,但由于护理过程脏、繁琐且工作量大,导致护理人员短缺且费用高昂,同时也伤害了老年人的隐私和心理健康。
2、在国外,一些国家已经开始研究排控便能力增强训练,取得了一些成果并推出了一些商业化产品。然而,国内对于这方面的研究相对较少,还停留在单一的训练模块上,没有针对整个排控便机理进行训练的机器人。同时,目前国内外的设备康复训练手段较为单一,缺乏多部块和多模式的系统训练,设备的综合性有待提高。
3、为了解决上述问题,研制排控便能力增强训练机器人成为一个有效的解决方案。这样的智能康复机器人可以填补护理人员的缺口,解放社会生产力,同时也能增强老年人的身体素质、心理健康和自信心。然而,当前该机器人研制面临一个关键问题,即多模块多模式系统的控制实现难度较高。因此,本发明提出一种卧床老人二便能力增强训练机器人的控制系统及其方法,它可以填补国内外相关领域的技术空白,缓解老龄化给社会带来的压力,提高老年人的身心健康和生活质量,构建老龄化和谐社会。
技术实现思路
1、鉴于此,本发明提供一种卧床老人二便能力增强训练机器人的控制系统及其方法,通过改进上位机功能和界面,实现与康复机器人的更有效的人机交互、任务规划和控制。
2、为达到上述目的,本发明的卧床老人二便能力增强训练机器人的控制系统包括:上位机、下位机、传感器和机器人执行单元。其中,上位机负责任务规划、控制指令的生成和人机交互;下位机用于控制多个模块运动工作;传感器用于感知卧床老人的运动情况和生理信号;机器人执行单元执行上位机生成的指令并与卧床老人进行训练。
3、本发明的上位机具有以下功能:人机交互模块、任务规划模块和控制指令生成模块。人机交互模块负责与卧床老人进行交互,接收康复处方信息和用户输入,包括训练方式、训练强度、训练时间、训练顺序和参数定义等。任务规划模块基于康复处方信息和康复训练方式,进行任务规划和生成相应的训练方案。控制指令生成模块将任务规划结果转化为机器人可以执行的具体控制指令,包括关节运动、力传感控制和刺激位置调整等。
4、本发明的方法包括以下步骤:接收康复处方信息和用户输入;根据康复处方信息和康复训练方式,进行任务规划和生成训练方案;将任务规划结果转化为机器人可以执行的控制指令;通过机器人执行单元执行生成的控制指令与卧床老人进行训练。
技术特征:
1.一种卧床老人二便能力增强训练机器人交互行为的控制系统与方法,其特征在于,包括:
2.根据权利要求1所述的控制系统(100),其特征在于,所述运动训练模块(200)包括:
3.根据权利要求1所述的控制系统(100),其特征在于,所述盆底肌训练模块(300)包括:
4.根据权利要求1所述的系统,其特征在于,获取被监测老人盆底肌肌力信号以及核心肌群肌力信号;
5.根据权利要求4所述的卧床老人二便能力增强训练机器人交互行为的控制方法,其特征在于,对所述肌力信号进行可视化,盆底肌肌力信号以视觉传达的形式给康复老人以生物反馈,具体包括但不限于曲线追踪形式,曲线形式可为多种如三角波、方波等;磁触发形式以及游戏康复形式。游戏康复形式具体体现为用盆底肌肌力数据作为输入,控制游戏中角色或者人物进行一定的动作,可有多种形式。
6.根据权利要求5所述的康复处方与训练评估系统,其特征在于,从云端或互联网下载康复处方,能够对其进行解析,并进行相应的运动规划,完成训练康复对盆底肌肌力数据、核心肌群肌力数据、训练时间、训练强度数据进行整合与评估,输出评估报告。
7.根据权利要求6所述的系统,其特征在于,多模块协调工作,生物反馈模块与运动康复模块协调工作,体现为运动康复过程中,实时反馈盆底肌肌力和核心肌群肌力,指导运动康复的进行;生物反馈模块和电磁刺激模块协调工作,体现为生物反馈康复过程中设置触发点,进行电磁触发刺激,增强生物反馈效果;振动模块与运动康复模块协调工作,体现为进行主动的运动康复过程中,振动模块工作提供被动的康复,主被动康复协同实现。
技术总结
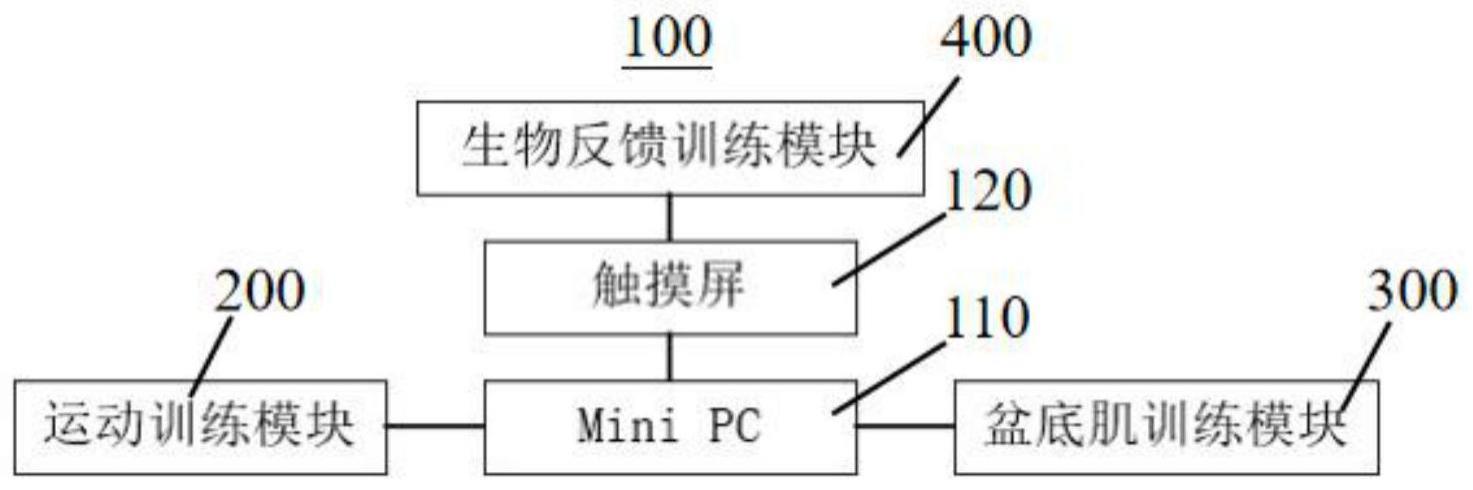
本说明书一个或多个实施例提供一种卧床老人二便能力增强训练机器人的控制系统及其方法,包括:Mini PC、触摸屏、运动训练模块、盆底肌训练模块、生物反馈训练模块。所述Mini PC、触摸屏为上位机,所述各模块中的控制板为下位机,所述控制系统还有多种传感器和机器人执行器。上位机负责任务规划、控制指令的生成和人机交互,下位机用于控制多个模块运动工作,传感器用于感知卧床老人的运动情况和生理信号,机器人执行单元则执行上位机生成的指令并与卧床老人进行训练。该发明通过改进上位机功能和界面,实现了与康复机器人的更有效的人机交互、任务规划和控制,为卧床老人提供了二便能力增强训练的个性化和高效方式。
技术研发人员:陈殿生,王英涵,韩甲寅,陈凯
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/16